自動配送ロボットの開発(1)

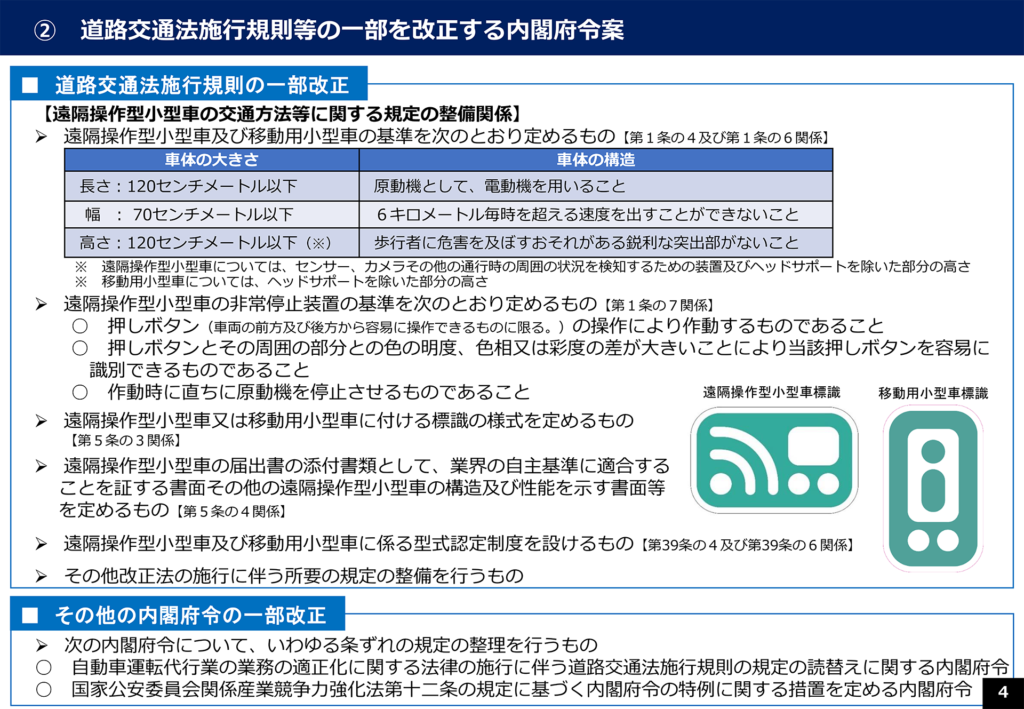
2023年4月より自動配送ロボットが遠隔操作で歩道を走行できるようになります。
歩道を走行するため、小型で最高時速も6kmに制限されます。
弊社でも自動配送ロボットの開発を行なっており、歩道での遠隔操作による走行を目指しています。
遠隔操作といっても常に人が操縦するわけではなく、ある程度自動走行させながら遠隔で人が監視し、注意が必要な箇所は人が操縦するというシステムになります。
そのため、自動配送ロボットといいつつ、自動運転自動車のようなカメラやセンサー、コンピューターも搭載することになります。
自動走行の方法としては、事前に経路の3D地図を作成しておき、どこを走行しているのかをロボットのコンピューターが認識しながら走行する方法や高精度なGPS情報を利用して位置を測定しながら走行する方法があります。
弊社では後者の高精度なGPS情報(CLAS)を利用し、ドローンの制御に利用されている技術と組み合わせて採用します。ただし、ドローンは空中を飛行するため数十センチずれていてもそれほど問題ではありませんが、歩道を走行する自動配送ロボットはなるべくズレがなく位置を特定する必要があります。そのため、さまざまなセンサーの情報を処理し車体を制御する必要があります。
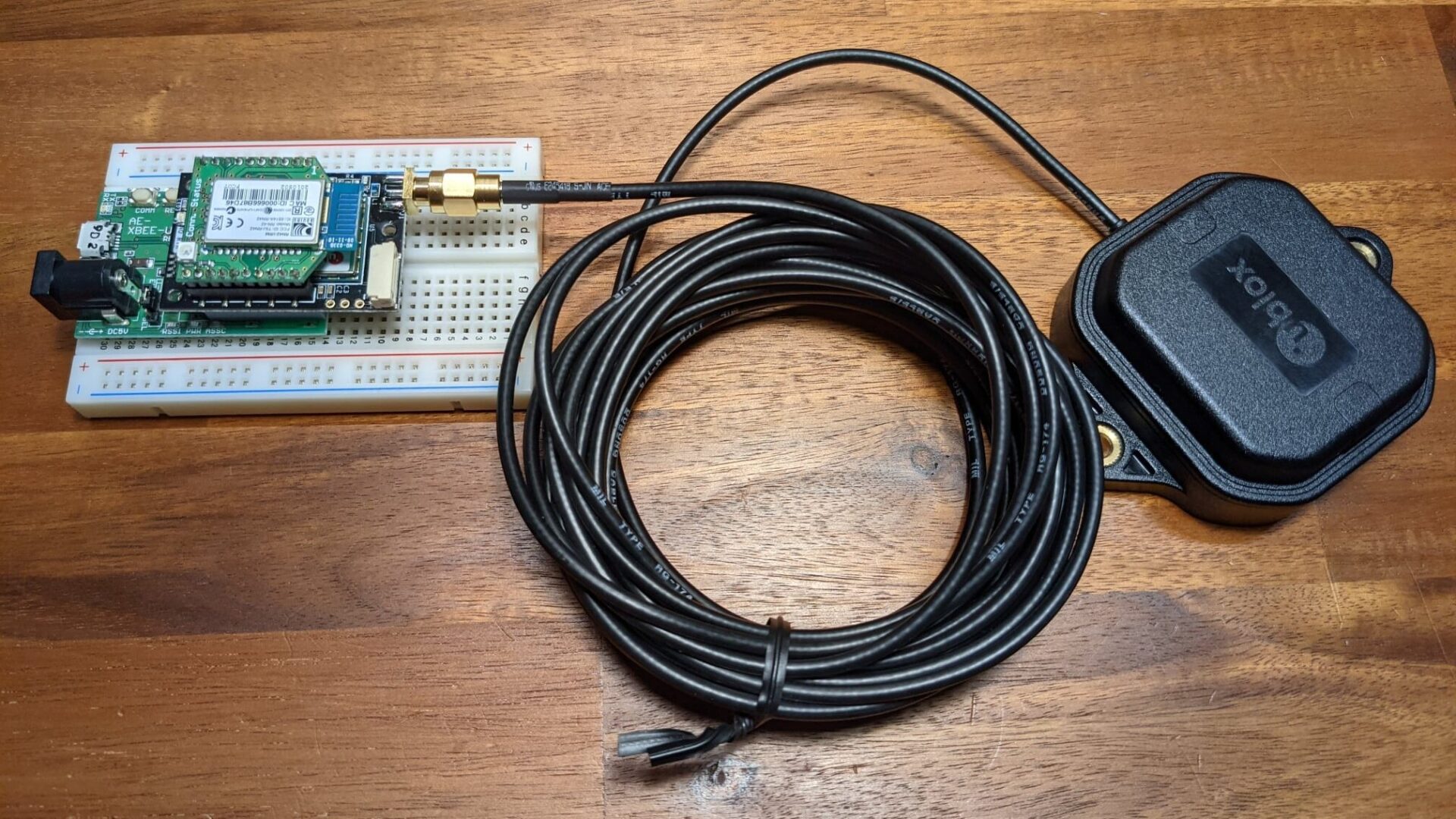
高精度なGPS情報(CLAS)は「みちびき」という人工衛星から送信されている電波を利用します。同じような技術でRTKという技術もありますが、こちらは走行エリア内に基準局という装置を設置する必要があり、あるいは携帯電話会社が提供している有料サービスを利用する必要があるため、可能な限りCLASを利用したいと考えています。
車体の制御を行うコンピューターはNDIVIA Jetson Orinという自動車の自動運転にも利用可能なコンピュータです。リアルタイムに大量の情報を処理することができます。また、コンピューターで動作させるソフトウエアはROSというロボットを制御するソフトウェアです。人が使うパソコンのソフトウェア(OS)はWindowsなどですが、ロボット専用のソフトウェアがROSというものです。
ROSを利用することでさまざまのセンサの情報を処理し車体を制御することが可能になります。
弊社が開発を目指すのは、ある程度の悪路でも走行可能な自動配送ロボットで、アスファルト舗装されていない道でも走行できるようにしたいと計画しています。
そのため、2種類の駆動部を採用予定で路面状況に応じて切り替えられる構造にします。
1つは比較的整備された路面用の車輪タイプ。もう1つは悪路を走行するクローラータイプです。
車輪タイプは最高時速6kmを出せるため、通常時はこちらの利用を想定しています。
クローラータイプは最高時速が3kmと遅めですが、小型ながら最大積載量が80kgと重い荷物の運搬も可能です。
クローラータイプは数センチの積雪でも走行可能(弊社所在地、鳥取県八頭町はもっと降りますが。)ですし、畑などでも走行可能であるため、農業分野での運搬業務の自動化に活用することでスマート農業の一翼を担うことも可能だと考えています。
また、田舎は押しボタン式の信号機が多いため、自動配送ロボットにロボットアームも搭載し、押しボタン信号のボタンも押せるようにできると面白いなと思っています。すでに弊社では小型ロボットアームの制御実績もあることから、押しボタンの位置をカメラで認識し、アームを操作することでボタンを押すことは不可能ではないと考えています。


最後に車輪タイプのローバーの映像です。4輪を個別に制御できるため、小回り動作が可能です。